

Neurointerfaces
The organism exists in continuous interaction with the environment, and the effectiveness of this interaction in animals is largely ensured by the work of the nervous system. So, the human brain receives information from the senses and sends signals to the muscles, regulating the movement and again receiving information about its results. This is a balanced system developed in the course of evolution, but the work of its links can be disrupted as a result of trauma or illness: for example, the damage to the sound-receiving apparatus causes loss of hearing; defeat of motor neurons with amyotrophic lateral sclerosis leads to paralysis of limbs and muscle atrophy; damage to the spinal cord leads to loss of sensitivity and the possibility of movement of the body below the place of injury. First of all, in order to restore the possibility of interaction in such situations, neurocomputer interfaces (NPI) are developed, which allow measuring electrical activity in the central and peripheral nervous system, interpreting it and turning it into signals for some device (for example, a hand prosthesis), or influencing this activity, informing the body of information about the external world.
The brain-computer interface (BCI) is a kind of neurocomputer interface in which information exchange occurs directly at the brain level (rather than, for example, peripheral nerve fibers); Thus, for example, the user can control some external device, intentionally modeling the activity of his brain.
In the last few decades, such systems have found both clinical and research applications and have received many differently different implementations. In the clinic of the ideomotor control session (controlled by imaginary movements), the BCI is used for post-stroke rehabilitation and recovery of movement possibilities; another type of therapy - neurovolatical communication - helps patients with neurological disorders, such as epilepsy, learn how to independently regulate the rhythms of the brain, improving their condition. In addition, a closed system that includes the measurement of brain activity with feedback can be used to investigate the neurophysiological processes that are used to generate commands, monitor training effectiveness or operator status, and conduct experiments in a closed-loop paradigm that models, among other things parameters of the state of the brain during the experiment.
Ideomotor brain-computer interface based on EEG
Electroencephalogram (EEG) is a method of detecting brain activity, often used in the clinic as well as in cognitive science due to safety, ergonomics and availability of equipment. EEG provides high temporal resolution, allowing to record rapidly changing signals in time, however, due to the characteristic features of this method of recording (remoteness from the source, scattering of the electric field during passage through the meninges and skull, artifacts caused by muscle activity and movement of the eyes) The noise in the signal limits the number of possible commands and the response time.
For a reliable decoding of the team, it is necessary that it correspond to a sufficiently large-scale neurophysiological phenomenon, which can be detected despite the listed difficulties. An example of such a phenomenon is the fall in signal power in the mu-band (8-12 Hz), which is observed during movement over a section of the cortex in which the moving part of the body is represented. As a rule, with non-invasive recording, movements of parts of the body having extensive representation in the sensorimotor cortex (and, therefore, causing a more noticeable signal change during movement) are used. In particular, the ideomotor interface developed by our group based on EEG can use real and imaginary movements of hands, feet and tongue as commands.
The detection of changes in the signal corresponding to the commands, and the differentiation of commands among themselves is carried out using algorithms for signal processing and data analysis. Due to the nonstationarity of the signal associated with noise, the individual features of the interface users, the plasticity of the brain and the variability of the recording conditions for decoding commands, algorithms with a number of parameters that are customized individually before using the interface are used. To adjust the parameters of the algorithm, it is necessary to record, during which the person reproduces the states that will be used as commands for the interface, and for each moment of time it is known what state is reproduced at that moment. After this, using the algorithms of machine learning, it is possible to construct a function that processes new data and decodes the state solely by the signals of the brain. The process of recording the calibration data and using the interface in is shown in the video below.
Demonstration of calibration and use of the developed ideomotor brain-computer interface based on EEG.
The following video shows an example of using the same interface by two users. Interaction can be built in a cooperative or competitive mode: both operators control the movement of the device, trying to deflect it either in one or the opposite directions. Such a paradigm can be used both under experimental conditions and in the context of rehabilitation as a task that motivates and involves the user in performing actions that stimulate neuroplasticity and increase the chances of recovery.
Использование интерфейса двумя пользователями в соревновательном режиме.
Development of bidirectional interface based on ECOG
As a rule, brain-computer interfaces are implemented on the basis of non-invasive methods, but a significant increase in the channel capacity between the brain and an external device is possible only with the use of technologies that require surgical intervention. Electrocorticography (ECoG) is a minimally invasive method for recording electrical brain activity that provides high spatial and temporal resolving power with a low level of risks for the patient. The ECoG signal contains information on the kinematic characteristics of motion, the decoding of which can be carried out using various data analysis algorithms. In addition, the recording of the ECoG signal can be combined with stimulation of cortical areas that can be used to transmit tactile feedback. Thus, ECoG is a promising technology for implementing a bi-directional brain-computer interface, which is the main goal of the International Center for Bioelectric Interfaces.
Our studies, conducted with the participation of patients who underwent subdural implantation of strip electrodes for preoperative mapping of the cortex, confirm the possibility of decoding the kinematic parameters of motion by the ECOG signal. In particular, for a synchronous recording of motion characteristics and an ECG signal, a series of experiments was performed, during which the subject made simple repetitive finger movements at a free rate.
The movements of the finger were recorded with a triaxial accelerometer in parallel with the ECoG recording from the electrode strips implanted on the contralateral motor cortex. After that, the task of decoding the trajectory of the finger movement, which was characterized by the accelerometer signal, was solved, according to the data of the multichannel recording of the ECoG.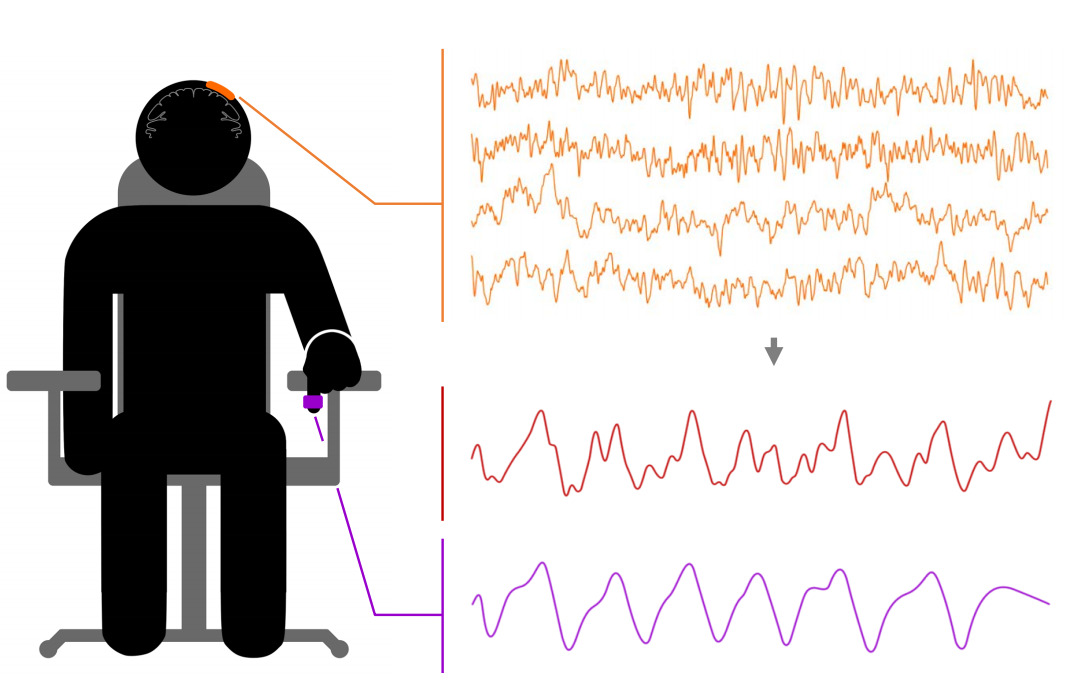 Регистрация сигнала ЭКоГ (оранжевый) и сигнала акселерометра (фиолетовый). При помощи алгоритмов машинного обучения (схемы справа) решается задача восстановления сигнала акселерометра по сигналу ЭКоГ. Для оценки точности декодирования используется коэффициент корреляции между реальным и предсказанным сигналом акселерометра.
|
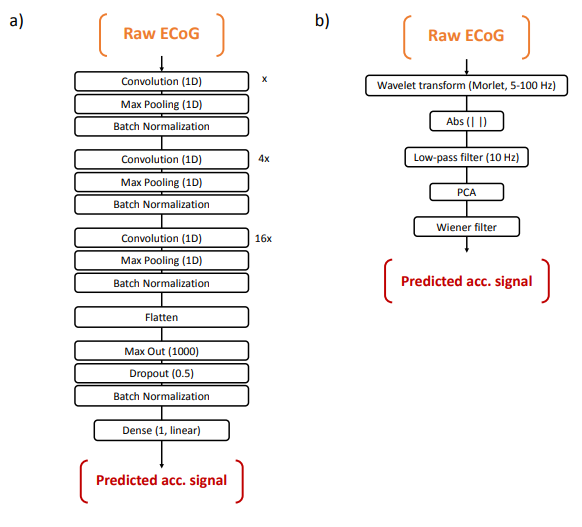 |
It has been shown that even with the use of a relatively simple decoding algorithm based on the calculation of the absolute values of wavelet coefficients and Wiener filtering, the finger movement profile can be reconstructed with high accuracy (correlation coefficient 0.56 between the real and predicted accelerometer signal in the causal decoding mode, i.e. when using ECG data preceding the time point for which the accelerometer signal is restored). When using ECOG signals of channels in non-causal mode, the classical algorithm achieves 70% accuracy.
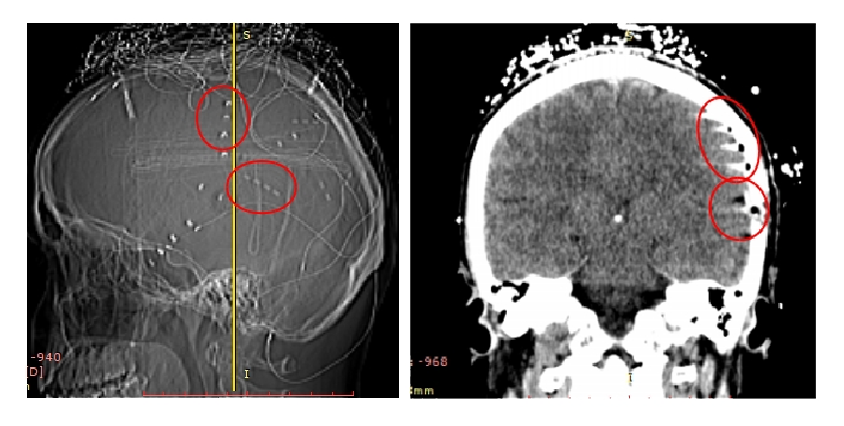 Постимплантационное КТ головного мозга пациента. ЭКоГ электроды видны как яркие точки на таком изображении.
Постимплантационное КТ головного мозга пациента. ЭКоГ электроды видны как яркие точки на таком изображении.
Nevertheless, the high content of information in the ECG data compared with non-invasive recording suggests that the use of complex machine learning algorithms with a large number of parameters will allow more accurate description of the data structure and improve the decoding quality. Such algorithms include deep learning methods - a family of algorithms that allow you to model complex hierarchical patterns in data.
Using the deep convolutional neural network shown in the figure above, it allowed to decode the profile of the finger movement with a correlation coefficient of 0.8 in the causal and 0.88 in the non-causal mode of decoding, which shows the possibility of representation by the deep convolutional neural network of information related to the kinematic parameters of motion. In addition, the analysis of the effect of individual channels and frequency bands on the decoding quality showed a physiologically plausible picture of the distribution of weights between the traits. Thus, it was shown the possibility of decoding kinematic motion parameters with high accuracy with the help of the minimally invasive ECOG method and modern deep learning algorithms, which creates the basis for implementing control of devices with a large number of degrees of freedom, as well as studies of the processes that ensure the performance of the motor act.
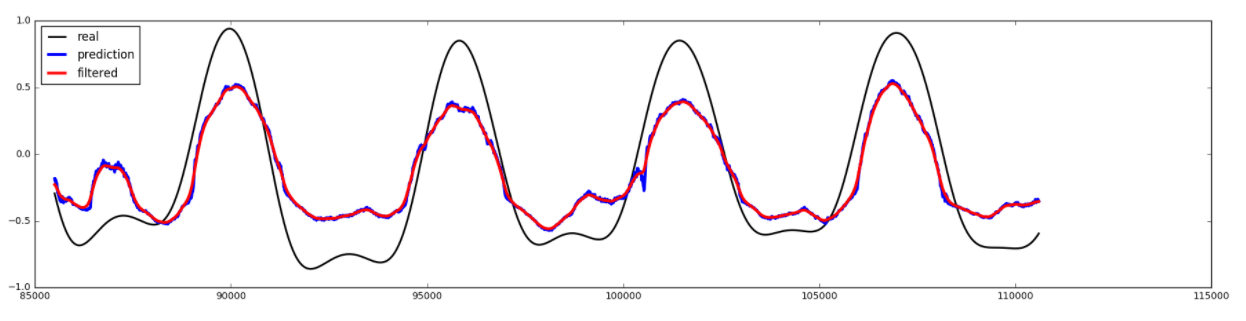
An example of a recording area with a plot of true (black) and predicted (blue - without a smoothing filter, red - with a filter) of the values of the accelerometer signal.

An example of a heat map showing the contribution of individual characteristics (channels and frames in the used for decoding the recording area of the ECOG) into the prediction of the accelerometer signal.
To adjust the parameters of the algorithm, it is necessary to record, during which the person reproduces the states that will be used as commands for the interface, and for each moment of time it is known what state is reproduced at that moment. After this, using the algorithms of machine learning, it is possible to construct a function that processes new data and decodes the state solely by the signals of the brain. The process of recording the calibration data and using the interface in is shown in the video below.
| Открыть Google Переводчик |
Google Переводчик
Google Переводчик - Google Translate
Google Переводчик
Приложения в Google Play – Google Переводчик
Google Переводчик - iTunes - Apple
Google Переводчик — Википедия
Видео
В Google-переводчике нашли скрытое оскорбление | Новости ...
«Google Переводчик» получил продвинутый офлайн-режим
![]()
Have you spotted a typo?
Highlight it, click Ctrl+Enter and send us a message. Thank you for your help!
To be used only for spelling or punctuation mistakes.